Linux 串口驱动是用于在 Linux 操作系统上管理和控制串行通信端口(通常称为 COM 端口或 ttyS 端口)的软件。串口驱动使得用户可以与串行设备进行通信,如调制解调器、打印机、GPS 设备、传感器等。
在 Linux 中,串口驱动通常由内核提供,并通过系统调用和设备文件系统(如 /dev/ttyS0, /dev/ttyUSB0 等)暴露给用户空间应用程序。内核中的串口驱动负责处理底层的硬件操作,如发送和接收数据、配置波特率、校验位等。
要使用串口驱动,您需要:
1. 确保您的硬件设备已正确连接到计算机的串口。2. 在 Linux 系统中,串口设备通常位于 /dev 目录下,如 /dev/ttyS0, /dev/ttyUSB0 等。您可以使用 `ls /dev/tty` 命令来列出所有可用的串口设备。3. 使用合适的串口通信工具或库来与串口设备进行通信。例如,您可以使用 `cat`、`echo`、`minicom`、`putty` 等工具来测试串口通信。
`cat` 和 `echo`:使用重定向和管道操作,您可以轻松地发送和接收数据到串口设备。 `minicom`:一个基于文本的用户界面,用于配置和测试串口通信。 `putty`:一个流行的跨平台串口通信工具,可以在 Linux 上使用。 `pyserial`:一个 Python 库,用于提供串口通信的接口。 `libserialport`:一个跨平台的 C 库,用于提供串口通信的接口。
请注意,具体的串口驱动和通信工具可能因您的 Linux 发行版和硬件配置而有所不同。在开始使用之前,请确保您已经安装了所需的软件包,并且您的硬件设备已经正确连接。
Linux串口驱动概述
Linux串口驱动是操作系统与硬件设备之间的重要桥梁,它负责管理和控制串口接口,实现数据的读写操作。串口通信在嵌入式系统、工业控制、智能家居等领域有着广泛的应用。本文将详细介绍Linux串口驱动的原理、开发过程以及在实际应用中的使用方法。
串口通信基础
串口通信是一种串行通信方式,数据以字节为单位,一个接一个地进行发送。串口通信接口通常包括TTL电平的串口和RS232串口。在Linux系统中,串口通常被称为UART(通用异步收发传输器)。
串口通信的基本参数包括波特率、数据位、停止位和校验位。波特率表示每秒传输的位数,数据位表示每个字节的数据位数,停止位表示每个字节传输结束后,停止的位数,校验位用于校验数据的正确性。
Linux串口驱动框架
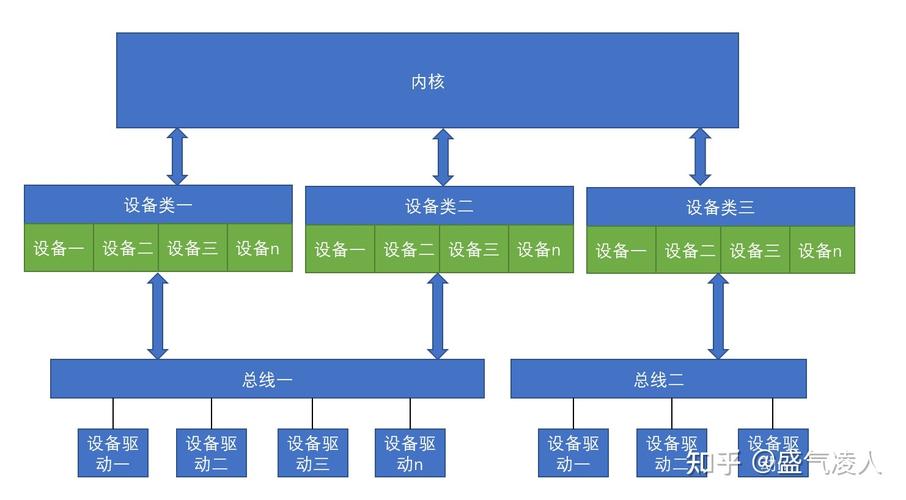
Linux串口驱动框架主要包括以下几个部分:
串口驱动注册:通过调用相应的函数将驱动程序注册到内核中。
串口设备初始化:初始化串口硬件,设置波特率、数据位、停止位、校验位等参数。
串口中断处理:处理串口中断,包括接收数据中断和发送完成中断。
读写函数:实现从串口读取数据和向串口写入数据的功能。
控制命令:提供一组控制命令,用于配置串口设备的各种参数。
Linux串口驱动开发
Linux串口驱动开发主要包括以下几个步骤:
编写驱动程序:根据硬件平台和需求编写驱动程序,实现串口初始化、中断处理、读写操作等功能。
注册驱动程序:通过调用相应的函数将驱动程序注册到内核中。
编写用户空间程序:编写用户空间程序,通过系统调用与驱动程序进行交互,实现数据的读写操作。
测试和调试:对驱动程序和用户空间程序进行测试和调试,确保其正常运行。
Linux串口驱动实例
以下是一个简单的Linux串口驱动实例,展示了如何实现串口初始化、读写操作等功能。
include